巡線機械人(Line Following Robot)
巡線機械人(Line Following Robot)甚麼是自動導引車(Automated Guided Vehicle,AGV)?控制系統(Control System)ProgrammingMotor ControllingStep 1 Test the motorStep 2 Test the IR sensorsStep 3 Sensors to input valueStep 4 P controllerRobot SimulatorStep 4.1 Modify the code if the robot run too fastStep 5 D controller附錄
甚麼是自動導引車(Automated Guided Vehicle,AGV)?



自動導引車(Automated Guided Vehicle,AGV)是工業上常見的一種自動化工具,通常會出現在全自動的無人工廠或全自動倉庫中。它是一類輪式移動機械人,沿着地板上的導線或標記塊或磁條運動,或者通過視覺導航或激光導航。多用於工業生產,在車間、倉庫運輸貨物。
現代的自動導引車一般都是配備了自動導航的IMU傳感器,也會用二維碼,機械人互相通訊,磁力地標等手段幫忙精準導航。
要完成一部功能完整的AGV,懂得巡線(或沿著特定路線行走)只是第一步。
如果巡線的路徑多於一條時,要由一間房間,到達另一間指定的房間,就要規劃最短(或至少能到達)的路徑,你可能有聽過在迷宮中只要沿著牆壁一路向左邊/或右邊走,就能找到迷宮出口;或者在每個迷宮分岔口留下小石塊,發現前方沒有路時,就能回到上一個分岔口走另一條路。這些「方法」稱之為「演算法」。

每到分岔口都向左,沿著牆壁而行

在每個路口放下小石塊

洪水演算法
當自動導引車多於一部時,就會產生交通管理問題,要怎樣同時為幾部導引車製定最短路線,而又互相不會相撞或擋路,這又是另一個「演算法」的問題。
控制系統(Control System)
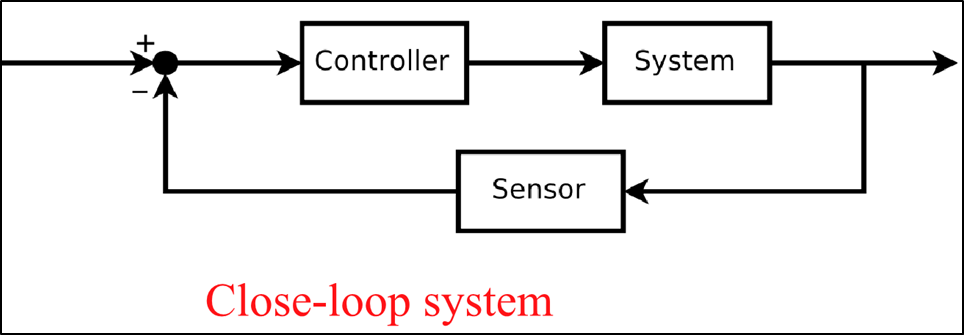
巡線機械人是一個經典的控制系統問題。甚麼是控制系統(Control System)?
控制系統(Control System)是指控制一個類比值保持一個指定的值。
For controlling a “dynamical systems”(for you, mostly is a analog value) to a desired value(set point) and “hold” the value
例如你的冷氣機控制著房內的溫度保持27攝氏度,慢煮機控制著水溫保持在54攝氏度,電鉻鐵保持尖端的溫度為320攝氏度等等。

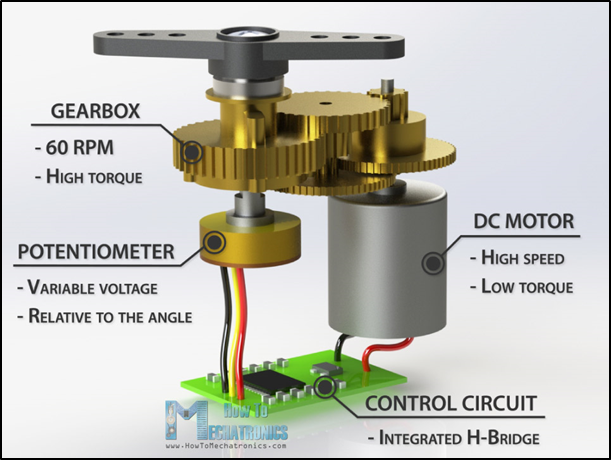
又或者,常用的伺服馬達就是一個典型的控制系統例子,一般的有刷馬達,只要供電就會不停旋轉,但伺服馬達連接上電位器,能感測到現在的角度,控制並保持特定的角度。
利用控制系統,除了溫度和角度,也可以控制位置。
而近年常見的自平衡車和無人機,都是控制系統的一種,分別控制其姿態(Attitude)和高度(Altitude)。
Programming
Motor Controlling
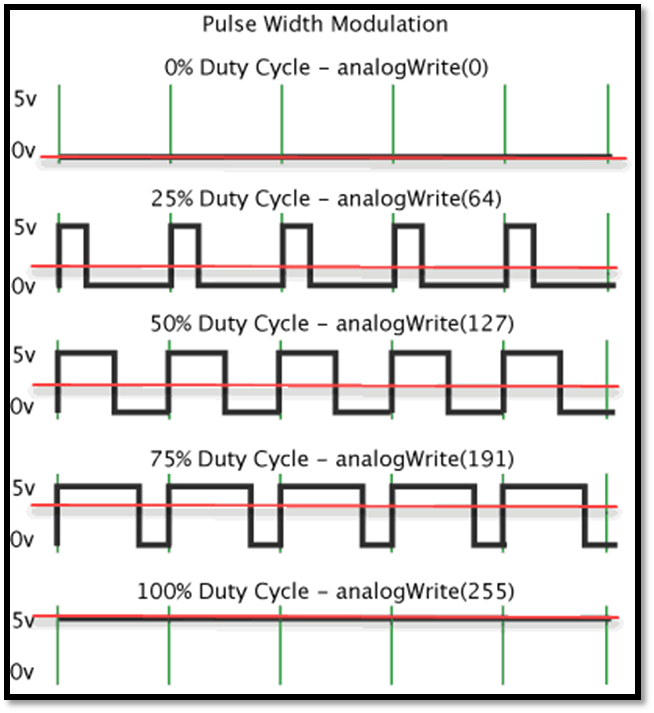
如果要控制馬達單方向旋轉,那只需要加一顆三極管就可以了。將控制端(三極管的Base腳)接上Arduino UNO的9腳(或其他有PWM功能的腳位: 3, 5, 6, 9, 10, 11),就可以用Arduino內置的PWM功能(即analogWrite() )來控制馬達的轉速

但如果馬達是要雙方向轉動,即可以正轉或反轉的話,電路就比較複雜,需要用到H橋(H-bridge)來控制。
如果要控制兩個馬達的話,就需要至少8顆三極管,線路就會變得很複雜。幸好,有市面上有專門的IC能做到相同的效果。
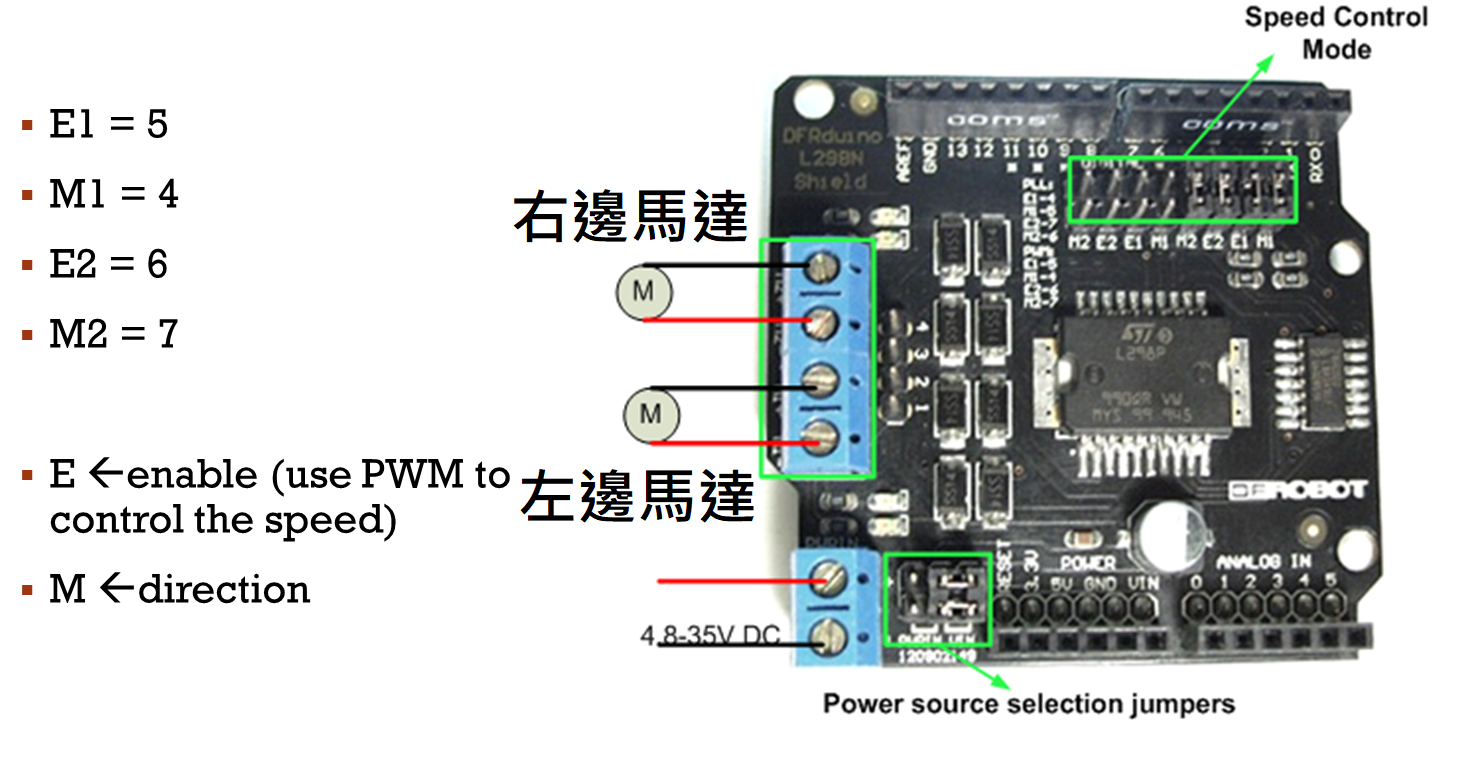
今次項目,我們會用到L298N motor shield。L298N整合了2個上面所提的H橋線路,能夠控制兩個小馬達,每路最多可輸出2A電流。而這塊L298N motor shield,甚至將L298N的控制腳位再簡化,E腳用來給PWM訊號去控制速度,M腳則控制馬達的旋轉方向。
Step 1 Test the motor
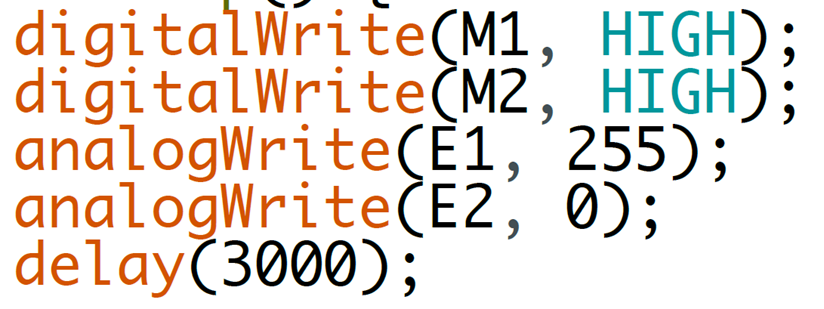
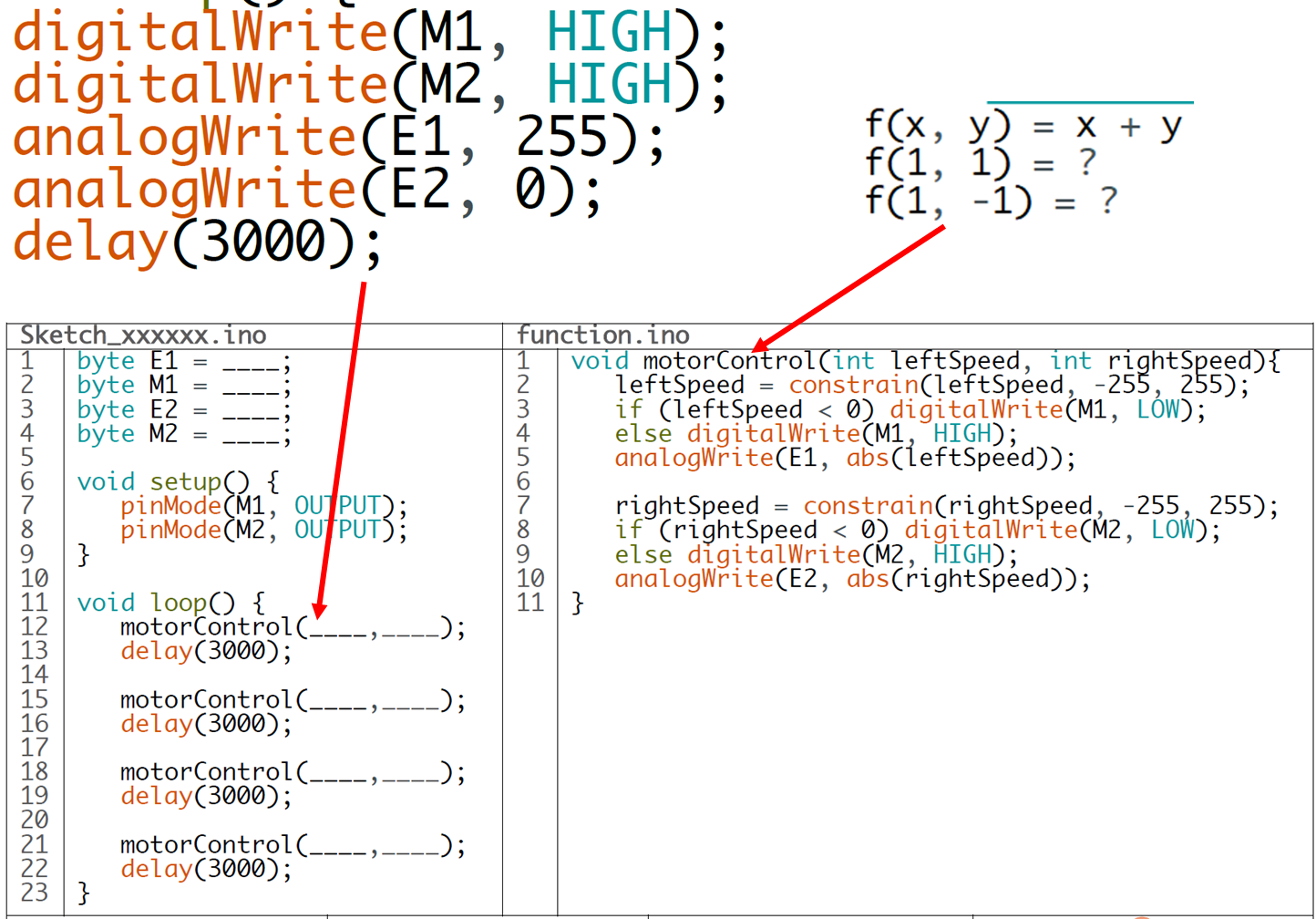
每次要控制馬達的旋轉,就需要到4句指令,如下圖,M1和M2是控制馬達的正轉或逆轉,HIGH是正轉,LOW是逆轉,M1是控制左邊馬達,M2是控制右邊馬達;E1和E2則為控制馬達的速度,範圍是0~255,E1控制左馬達,E2控制右馬達。所以下面4句,是命令左邊馬達以最高速度(255)正轉,右邊馬達則停下。
但每次控制馬達,都要打4句指令,是否覺得很麻煩呢?重覆的指令,而只改變變數的話,我們可以自定一個函數。
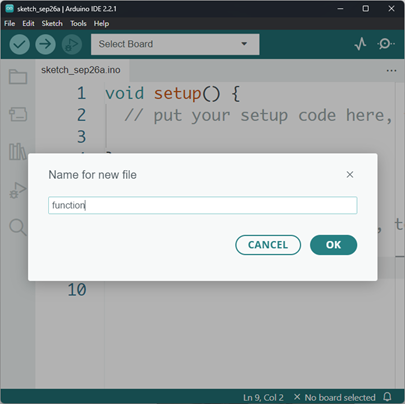
在Arduino右上角,有一個三個點的符號,按下去,就會見到一個新增標籤的選項,之後輸入新標籤的檔案名稱(function),就會出多一個分頁。

我們可以定義一個叫motorControl()的函數,函數有2個輸入,分別為左馬達的速度和右馬達的速度。
首先將輸入的速度限制在
-255~255間,constrain就是限制的意思,所有大於255的輸入會變成255,所有小於-255的數字會變成-255M1和M2腳位是用以控制馬達的正逆轉,但一般我們會用正數代表正轉,負數代表逆轉,就會更加直覺,所以下一步是判斷輸入的leftSpeed和rightSpeed是正數還是負數,正數的話,M1和M2腳位輸入HIGH,負數則相反。最後則是輸入
E1和E2的速度值,由於leftSpeed和rightSpeed有機會是負數,直接輸入analogWrite()的話會有錯誤,所以需要額外加入abs()絕對正。
利用這些指令,我們首先測試一下馬達的接線是否正確。例如下面的程式,兩邊馬達應為左正轉,右正轉,兩邊一起正轉,兩邊一起停。(記得打開鋰電池開關,否則USB的電是不足以同時推動兩隻馬達)
Step 2 Test the IR sensors
下一步,要測試一下對地的紅外線傳感器是否能正常運作。
保留上一步的program,loop()係面的可以全部刪去,紅圈為新增的部分。
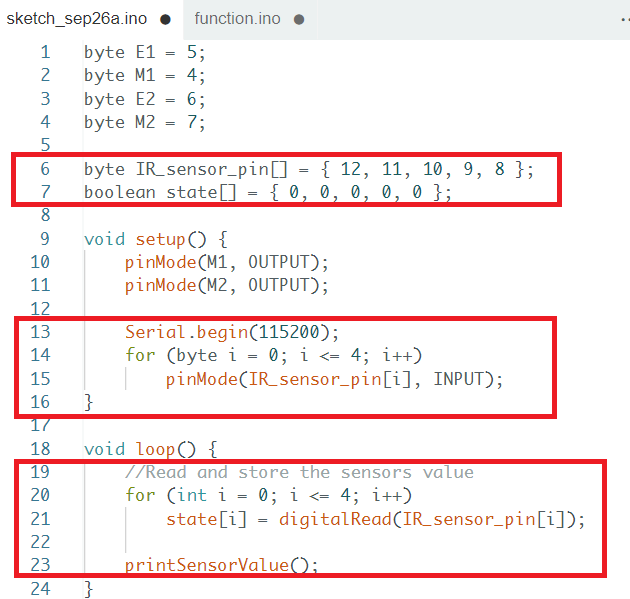
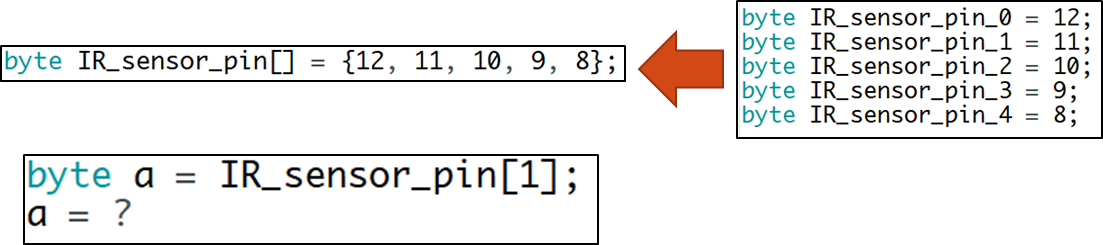
第6行IR_sensor_pin[],顧名思意,就是插著IR sensor的腳位,我插的是8至12腳。
而後面的[],是陣列(array)的意思。等同於你自行複製5次,名叫IR_sensor_pin_0至IR_sensor_pin_4,你當然可以這樣做,但如果IR sensor的數量再增加,例如增加到13隻,那這麼多變數就會十分難管理。
在陣列(array)的方括號中間加上數字,就會指定陣列中對應的編號。注意編程所有的數目都是由0開始。所以,IR_sensor_pin[0]對應的值就是12,IR_sensor_pin[1]對應的值就是11,如此類推。
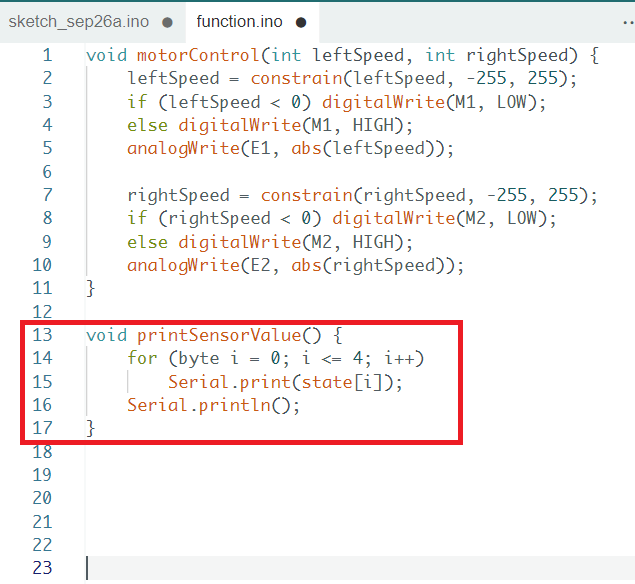
所以新增的幾行代碼,就是用digitalRead()讀取對應的腳位後,儲存在state[]中,接著用Serial.print()將它顯示出來。
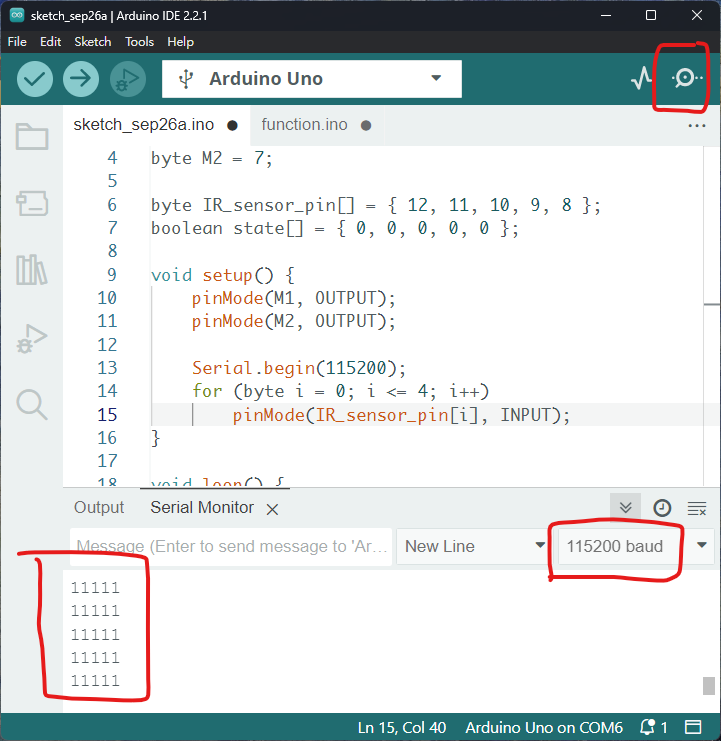
打開右上角的序列埠監空視窗(Serial Monitor),確保右下角的鮑率(bute rate)和你Serial.begin(115200)所輸入的鮑率是一樣的。就會見到5個0。
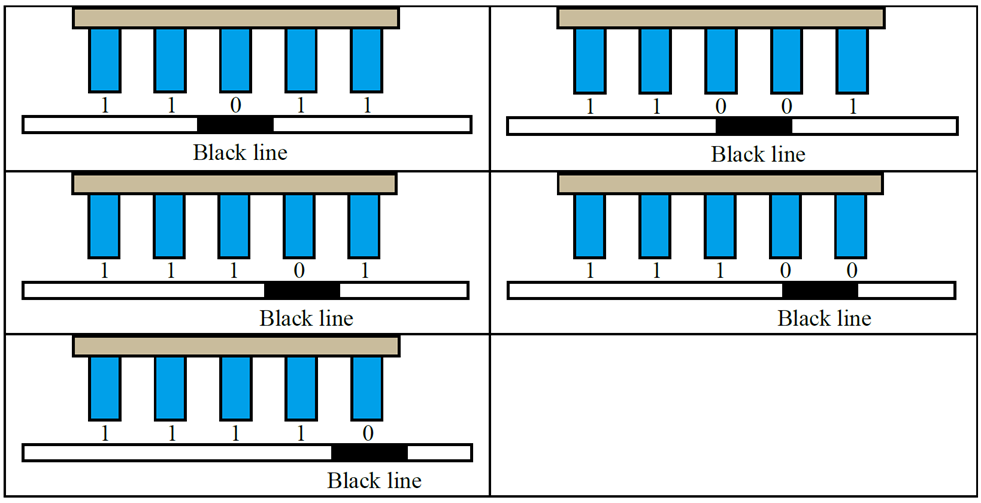
將sensor放在黑線上面,白色能反射紅外線,sensor就會收到反射的光,就讀到1,而黑線因不能反射紅外線,所以就會讀到0。你可以將sensor陣列放在黑線上面,左右移動,確保sensor在黑線上面是0,在白色面上是1。
動動腦:
我們的sensor有兩款,你要先試一試sensor在黑線上是
0還是1,這將影響後面編程的部分我這裡只有5粒sensor,但如果你有7粒、9粒或更多,你應該要怎樣修改程式?
Step 3 Sensors to input value
如果只有sensor的值,是不能反映機械人與直線偏移了多少的,所以要將讀到的值變成一個有意義的「偏移值」。
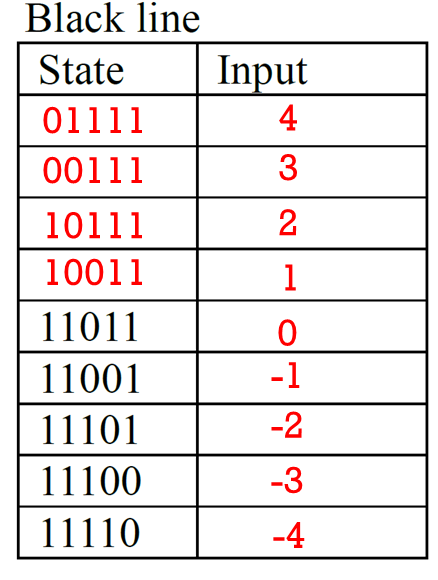
正如上面所示,如果黑線剛好在正中間的sensor之上,就會讀到11011,這時我們可以將「偏移值」設定為0。隨著機械人偏移向左邊,相反sensor陣列讀到的黑線就會偏移向右邊。如果sensor陣列剛好是黑線寬度的11011,11001,11101,11100,11110,到最後變成11111。我們就可以將其偏移的量量化,變成0,-1,-2,-3,-4,如此類推,機械人偏向右時也一樣。
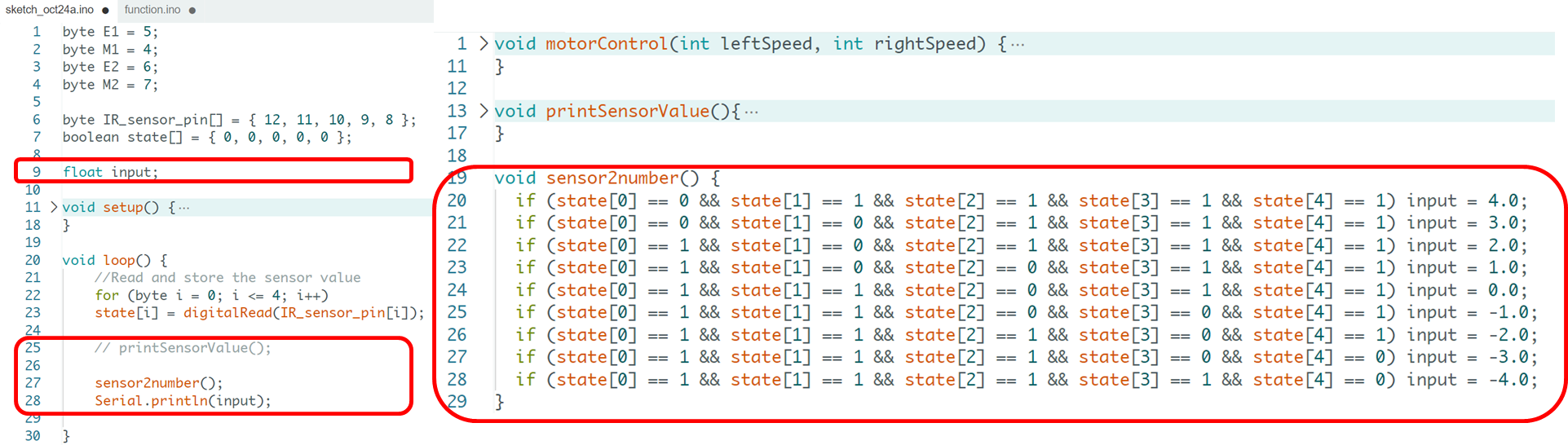
理論是有了,那怎麼將其用程式實行呢?首先要開一個變數,名字叫input,而格式是float。float跟之前的byte和int不同,後兩者只有整數,但float是浮點數,可以計算到小數。
sensor2number()是一個函數,其用途是將上述的表格,用「暴力」的方法實現出來。輸入代碼後上傳,開啟序列埠監控視窗(Serial Monitor),將機械人在黑線上偏移,就會見到相對的偏移值。
動動腦:
我們的sensor有兩款,如果你用的sensor在黑線上是
1白線上是0,你應該要怎樣修改?我這裡只有5粒sensor,但如果你有7粒、9粒或更多,你應該要怎樣修改程式?
Step 4 P controller
所謂的P controller,這裡並不是指一個實體的微控制器或甚麼遙控器(雖然P controller的確可以用電路來實現),這裡指的,更多的是一個演算法。
試想像一下,如果你冬天時在一間房間,房內有暖氣,但此暖氣是不能自動調溫的,如果你希望室溫保持在23度,那你會怎麼做?
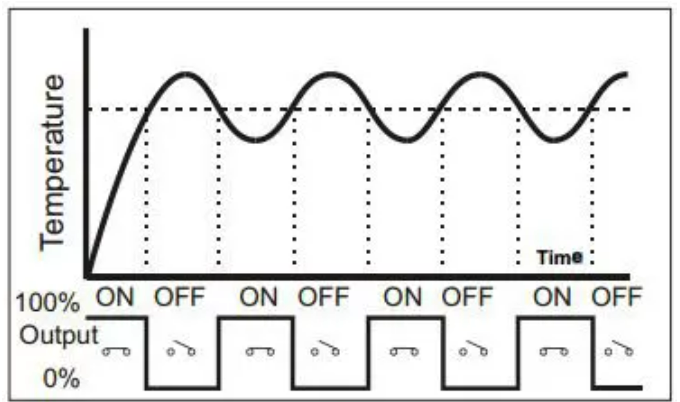
其中一個方法是:你看著溫度計,當溫度低於23度時就將暖氣開著,相反當溫度高於23度時,就將暖氣關掉讓室溫下降。這種方法稱為ON/OFF control,ON/OFF control簡單而有效,容易實現成本又低,但其的缺點也十分明顯,想像一下如果汽車稍微偏離航道,司機就將方向盤轉到底,那汽車就算不失控,也會不停左搖右擺。

用剛剛汽車的例子,如果要保持汽車在一條直線的路上行走,那麼司機只要看著地上的白線,如果汽車偏移向左少許,就將方向盤轉向右少許,如果偏移得多,就相應地將方向盤轉得更多。對,這就是P controller。P controller全稱為Proportional controller(比例控制器),就是上面所說,偏移得少,補償(方向盤轉去相反方向)得少,偏移得多,則補償得多。那要怎樣實現呢?
由於我們當初定義input時,就將置中值設定為0,而我們需要控制的,就是希望機械人一直保持置中,所以setpoint就是零,為方便運算,可以直接簡化為:
這裡的
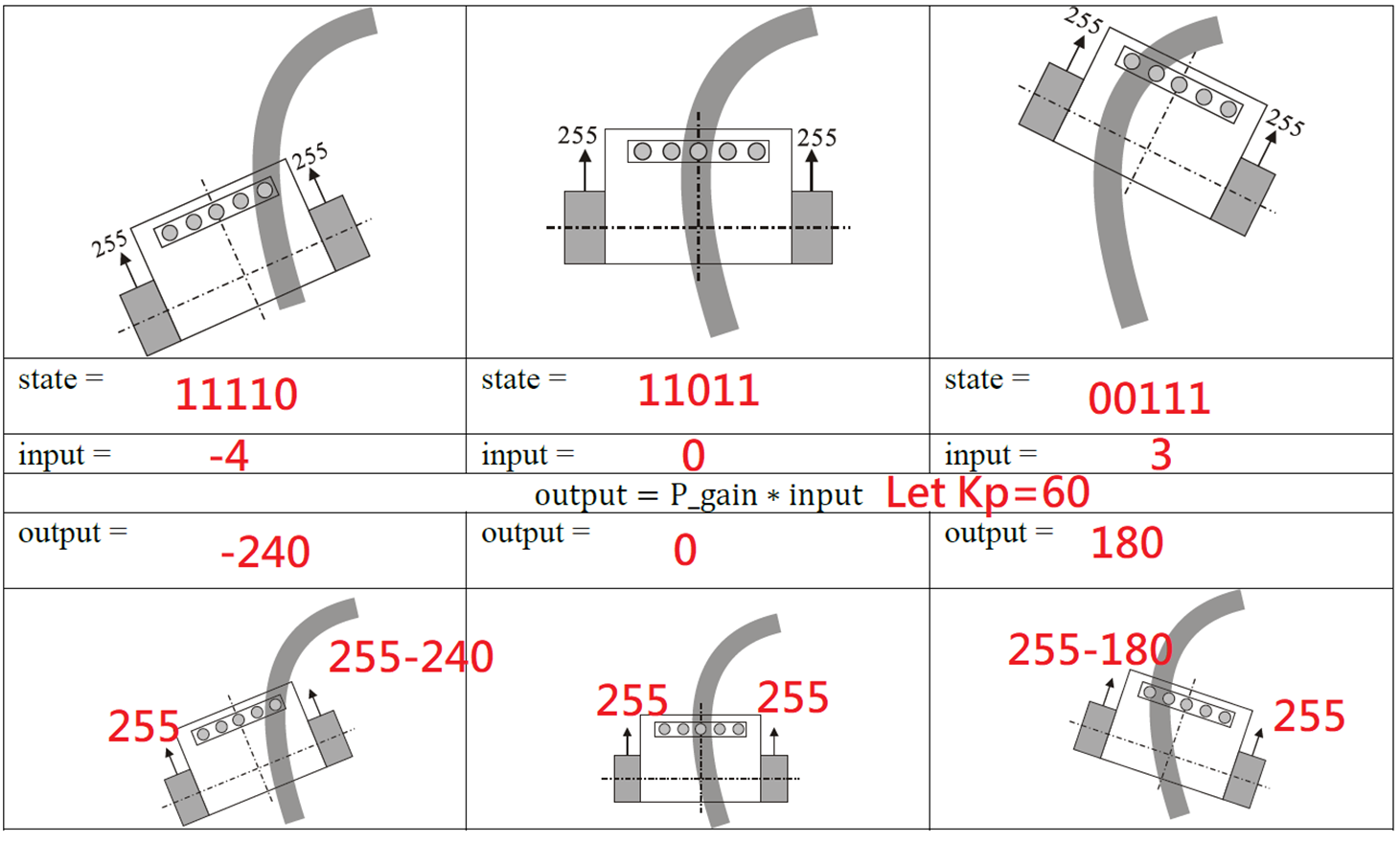
例如上圖,假設
相反,如果state = 00111,
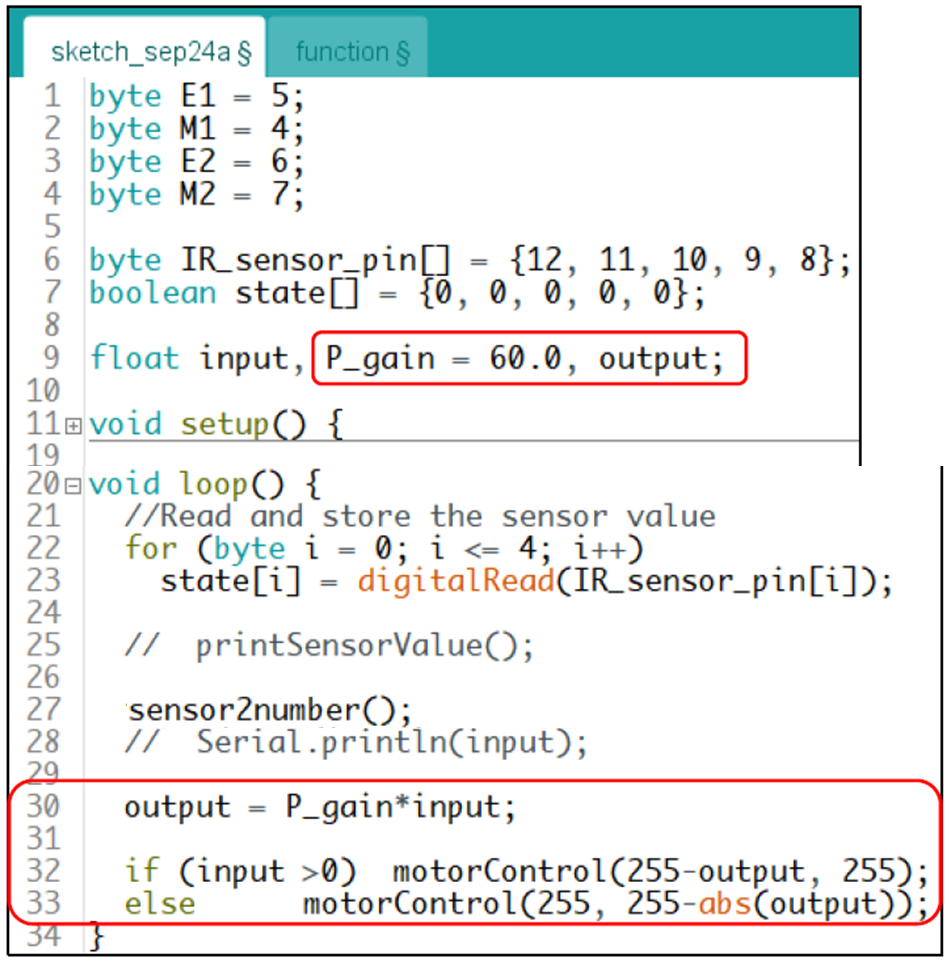
用program去實現上表,先將第28行的Serial.println(input);前加兩個//,將其轉變成注解。
數學式的P_gain來命名,之後需要再加入變數output對應數學式的
如果你是用慢速齒輪箱的話,將機械人放下,就應該可以直接在比賽場上走一圈。如果發現不能隨線的話,請檢查一下馬達左右/正負有否調轉,sensor的腳位有否左右反轉了。
Robot Simulator
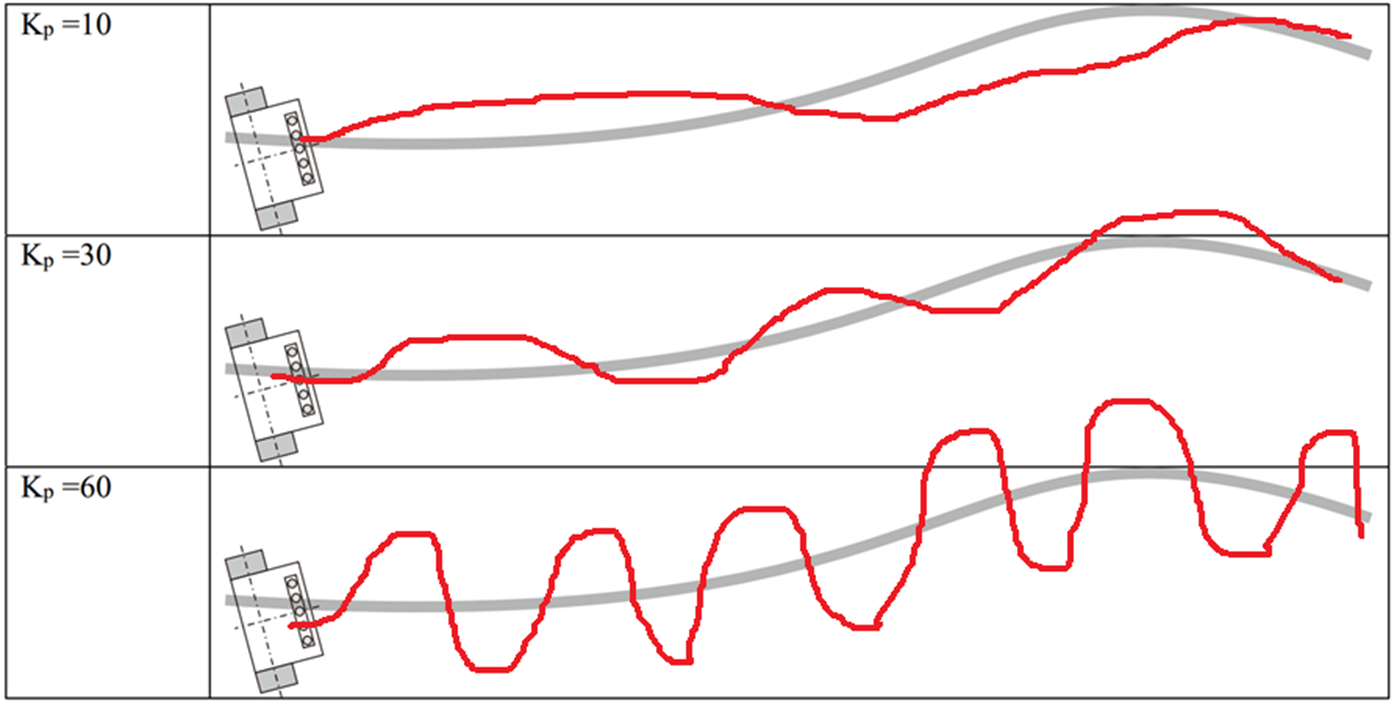
利用模擬器, 你可以見到,當
Step 4.1 Modify the code if the robot run too fast
如果機械人是使用慢速齒輪箱的話,就不會有這個問題,你恨不得它再快上一倍;但如果是使用快速齒輪箱,尤其是換了其他更快的馬達後,就會發現將速度設定到最大反而十分不穩定,很容易會出界,這時就需要將最大速度設定慢一點。
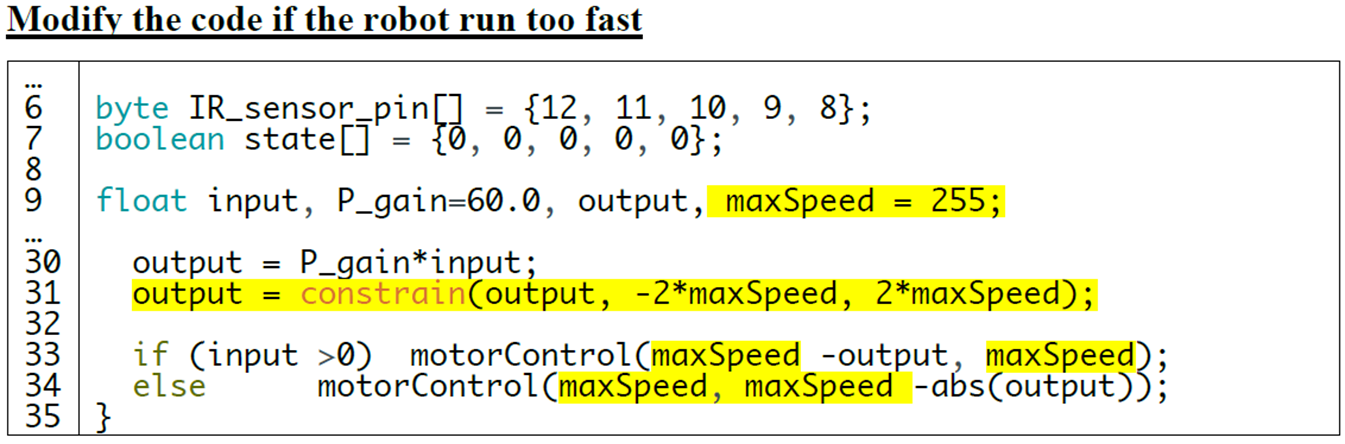
設定一個叫maxSpeed的變數,用來設定最大速度。之前我們沒有為計算出來的output值設限制的,限制來自於motorControl()中,有限制輸入到馬達的值最多是-255 ~ 255,但如果我們的最大速度不是255的話,就需要為output設限,限制為-2*maxSpeed ~ 2*maxSpeed。原本馬達輸出的255,也要設定為maxSpeed,建議可以用ctrl+H去做搜尋和取代。
Step 5 D controller
D controller 的全稱為Derivative controller(微分控制器),所謂的微分,其實就是斜率(slope)的意思。一個函數的微分,就是這個函數每一點的斜率所形成的函數。
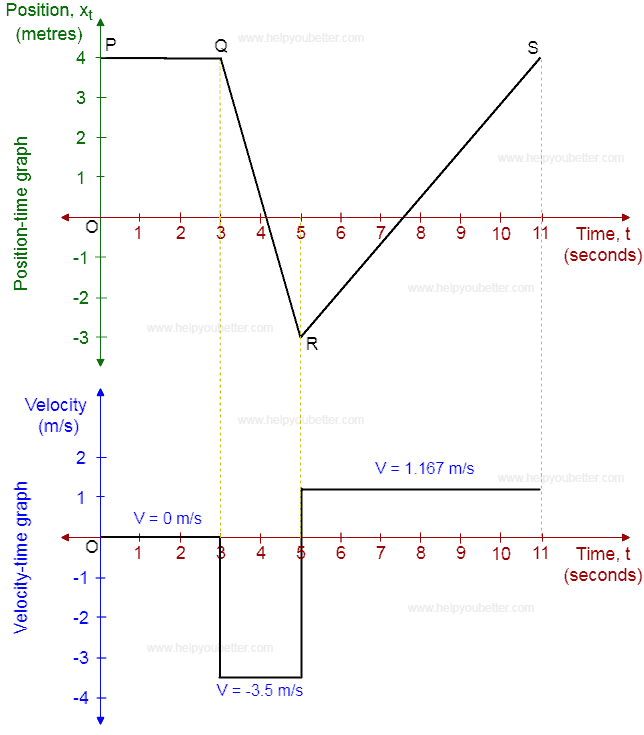
一個簡單的例子,就是你物理有見過的D-T graph和V-T graph的關係。要由上圖的D-T graph找出下面的V-T graph,就要就著每一條線段找出其slope(斜率)。
例如時間段0s ~ 3s,
時間段3s ~ 5s,
時間段5s ~ 11s,
其實對於位移(displayment)來說,速率(velocity)就是它的微分函數,對於速率(velocity)來說,加速率(acceleration)就是它的微分函數。
返回我們的D controller,如果只用P controller的話,無論你怎樣去調,你都會發現:如果直線調得很順滑,就會不夠力轉彎;如果夠力轉彎,直線就會不停左右搖擺。這時候,就需要再加上D controller,在數學式上是:
將今次測到的誤差減去上一次的誤差,再除以時間差。如果仔細看,後面的分數,其實就是斜率(0,所以0。又由於
由於D controller是對應變化而作出反應,所以走直線時幾乎不會有反應,只會對突然的變化,例如急彎時才會發生變化。但如果只用D controller的話,是沒辦法控制的,所以就會合併P controller 變成 PD controller:
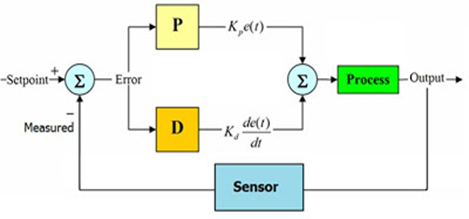
這裡有兩個參數,分別為

在程式上,只要簡單修改,就可以實現到D controller。如上面的數學式,你需要有一個變數儲存last_input,另外,D_gain,將第30行修改一下,變成上面數學式(5),但可以不需要除last_input = input;,將今次的input儲存起來,之後要加入delay()作為上面數學式的delay())不能太少,否則D controller的部分只會有極短時間有作用,加了等於沒有加。
你可以用這個模擬器,試試看
附錄
main.ino
x
1byte E1 = 5; // Enable pin for Left Motor2byte M1 = 4; // Control pin for Left Motor3byte E2 = 6; // Enable pin for Right Motor4byte M2 = 7; // Control pin for Right Motor5
6byte IR_sensor_pin[] = {12, 11, 10, 9, 8, A0, A1};7boolean state[] = {0, 0, 0, 0, 0, 0, 0};8
9byte no_of_sensors = 7;10
11float input, last_input, P_gain = 60.0, D_gain = 6.0, output, maxSpeed = 255;12
13void setup(){14 pinMode(M1, OUTPUT);15 pinMode(M2, OUTPUT);16
17 Serial.begin(115200);18 for(int i = 0; i < no_of_sensors; i++)19 pinMode(IR_sensor_pin[i], INPUT);20 21}22
23void loop(){24
25 /*26 // test the motor, check the wiring27 motorControl(255, 0);28 delay(3000);29 motorControl(0, 255);30 delay(3000);31 motorControl(255, 255);32 delay(3000);33 motorControl(0, 0);34 delay(3000);35 */36
37 // Read and store the sensors value38 for(int i = 0; i < no_of_sensors; i++)39 state[i] = digitalRead(IR_sensor_pin[i]);40
41 printSensorValue();42
43 sensor2number();44 // Serial.println(input);45
46 output = P_gain * input + D_gain * (input - last_input);47 output = constrain(output, -2*maxSpeed, 2*maxSpeed);48
49 if (input > 0) motorControl(maxSpeed - output, maxSpeed);50 else motorControl(maxSpeed, maxSpeed - abs(output));51 52 last_input = input;53 delay(10);54}function.ino
xxxxxxxxxx451void motorControl(int leftSpeed, int rightSpeed){2 leftSpeed = constrain(leftSpeed, -255, 255);3 if (leftSpeed < 0) digitalWrite(M1, LOW);4 else digitalWrite(M1, HIGH);5 analogWrite(E1, abs(leftSpeed));6
7 rightSpeed = constrain(rightSpeed, -255, 255);8 if (rightSpeed < 0) digitalWrite(M2, LOW);9 else digitalWrite(M2, HIGH);10 analogWrite(E2, abs(rightSpeed));11}12
13void printSensorValue(){14 for (byte i = 0; i < no_of_sensors; i++) 15 Serial.print(state[i]);16 Serial.println();17}18
19void sensor2number(){20 if (state[0] == 1 && state[1] == 0 && state[2] == 0 && state[3] == 0 && state[4] == 0 && state[5] == 0 && state[6] == 0) input = 6.0;21 if (state[0] == 1 && state[1] == 1 && state[2] == 0 && state[3] == 0 && state[4] == 0 && state[5] == 0 && state[6] == 0) input = 5.0;22 if (state[0] == 0 && state[1] == 1 && state[2] == 0 && state[3] == 0 && state[4] == 0 && state[5] == 0 && state[6] == 0) input = 4.0;23 if (state[0] == 0 && state[1] == 1 && state[2] == 1 && state[3] == 0 && state[4] == 0 && state[5] == 0 && state[6] == 0) input = 3.0;24 if (state[0] == 0 && state[1] == 0 && state[2] == 1 && state[3] == 0 && state[4] == 0 && state[5] == 0 && state[6] == 0) input = 2.0;25 if (state[0] == 0 && state[1] == 0 && state[2] == 1 && state[3] == 1 && state[4] == 0 && state[5] == 0 && state[6] == 0) input = 1.0;26 if (state[0] == 0 && state[1] == 0 && state[2] == 0 && state[3] == 1 && state[4] == 0 && state[5] == 0 && state[6] == 0) input = 0.0;27 if (state[0] == 0 && state[1] == 0 && state[2] == 0 && state[3] == 1 && state[4] == 1 && state[5] == 0 && state[6] == 0) input = -1.0;28 if (state[0] == 0 && state[1] == 0 && state[2] == 0 && state[3] == 0 && state[4] == 1 && state[5] == 0 && state[6] == 0) input = -2.0;29 if (state[0] == 0 && state[1] == 0 && state[2] == 0 && state[3] == 0 && state[4] == 1 && state[5] == 1 && state[6] == 0) input = -3.0;30 if (state[0] == 0 && state[1] == 0 && state[2] == 0 && state[3] == 0 && state[4] == 0 && state[5] == 1 && state[6] == 0) input = -4.0;31 if (state[0] == 0 && state[1] == 0 && state[2] == 0 && state[3] == 0 && state[4] == 0 && state[5] == 1 && state[6] == 1) input = -5.0;32 if (state[0] == 0 && state[1] == 0 && state[2] == 0 && state[3] == 0 && state[4] == 0 && state[5] == 0 && state[6] == 1) input = -6.0;33
34 // float avg = 0, sum = 0;35 // boolean onLine = false;36
37 // for (byte i = 0; i < no_of_sensors; i++){38 // avg += i * state[i];39 // sum += state[i];40 // onLine = onLine || state[i];41 // }42 43 // if (!onLine) input = last_input;44 // else input = avg/sum - (no_of_sensors - 1) / 2.0;45}